
AGV/AMRを『現場の即戦力』に変える
「搬送ロボットを導入したけれど、現場に馴染まない」「特注の治具や装置が必要だが、開発リソースが足りない」…その悩み、弊社が解決致します。弊社は「搬送ロボット」のエンジニアリングに特化。経験豊富なチームが、現場のニーズに合わせた装置の設計や制御を実現致します。

AGV(予め磁気テープなどできめられたルートを走行)/AMR(周囲の環境地図を作成し、自律走行)といった搬送ロボットは既存の搬送業務を自動化するのを支援します。これまで「ロボットを買えば完全に自動化できると思っていたが、活用しきれていない…」そんな現場の声を、数多く聞いてきました。
・積込・荷下ろしが自動化できない
・安全システムが不十分
同様に搬送ロボット・オプション装置を自社開発されるメーカー様にとっても、社内のエンジニアリソースで悩まれているケースもあります。
・本体の開発に忙しい
・追加オプションの引合いは対応できず断っている
搬送用ロボット導入にあたり、現場の運用に合わせた様々なお悩みに対し、弊社ではカスタマイズ・開発の支援をさせて頂いております。以下5つのメリットをご紹介致します。
弊社は搬送ロボットで10年近く調達・機構設計、ソフトウェア開発をしてきたチームで構成されています。「搬送」ならではの設計時に注意すべき点についても苦労を重ねてきており、過去の経験を活かしてソフトウェアとハードウェアが密接に連携する「ウワモノ」といわれるような装置や、ロボット本体の機能開発を支援致します。同様に最近は優れた制御キット出回っており、それらを有効活用しながら自社ロボットの製作や追加センサーの開発、PLC/シーケンサー制御などによる設備連携もご提案可能です。

搬送ロボットを導入するメーカー・商社様にとって、本体以外のカスタマイズは開発や検証が大きな負担となります。工数確保が困難なエンジニアに代わってエンサーブが設計・検証を実施することで、自社のエンジニアは本来の業務に集中できます。本体の開発や導入準備と並行して弊社でカスタマイズを行うことで、エンドユーザー様は搬送ロボットを効果的に利用頂けます。

首都圏最短当日。トラブルや急な仕様変更も安心です。

現場主義の設計だから、導入後の『使いにくい』をゼロにするようにつくりこみます。3Dプリンターなどの技術を用いて、短期間で試作品を作成し、迅速な検証を行っています。また初期費用を徹底的に削減するノウハウ・ネットワークも活用可能です。現地現物も重視しており、図面にないお客様の加工注意点・外観基準もすり合わさせて頂きます。

お客様へ真に最適なソリューションを提供するため、特定のメーカーや販売代理機能を持ちません。
お客様の現場環境、既存設備、予算、そして「本当に解決したい課題」を徹底的にヒアリングし、そのニーズに合致する最適なカスタマイズや周辺機器の開発をご提案し、物流自動化を実現します。
搬送ロボットにまつわるあらゆること(本体設計、手動・電動装置、ソフトウェア)をご提案可能です。また、仕様検討からものづくり、アフターサポートまでワンストップでご相談いただけます。POCや概念検証と言われる原理的な試作のみや、カスタマイズ用要求仕様の設定とったご依頼も承っております。
| 工程 | 提案内容 |
|---|---|
| 仕様検討・設計 | 困り事をヒアリング、現場確認も致します。 図面にないお客様の加工注意点・外観基準も把握させて頂きます。 |
| 部材調達 | 条件に合わせて国内外での最適調達を致します。 |
| 組立 | 国内での組立前提となります。 |
| 検査 | 図面・仕様書以外の検査内容について事前相談させて頂きます。 |
| 現地試験 | 据え付け、導入時での動作確認を致します。 |
| 引渡 | 納品確認を一緒にさせて頂きます。 |
| サポート | 追加の機能、部品交換を支援させて頂きます。 |
ハードウェア開発実績は以下の通りとなっております。設計ソフトウェアのメインはCREO、Fusion360、Solidworksとなります。
| 実績 | イメージ | 詳細 |
|---|---|---|
| 大型 自動搬送 ロボット |  | 物流センター向け同容量搬送ロボットの搬送力を向上をするためフレームを抜本的に見直し。恒常的に発生する静電気やEMC対策の設計を施し、安定運営に貢献。また、様々なオプションと連携可能な本体構造を設計。 |
| 各種 オプション |  | 様々な顧客のニーズに合わせて機械機構品を設計。手動から自動まであり、導入にあたり、かならず検証の上、使用上の注意点をユーザー様に伝えた上で引渡し。 |
| 小型 自動搬送 ロボット | 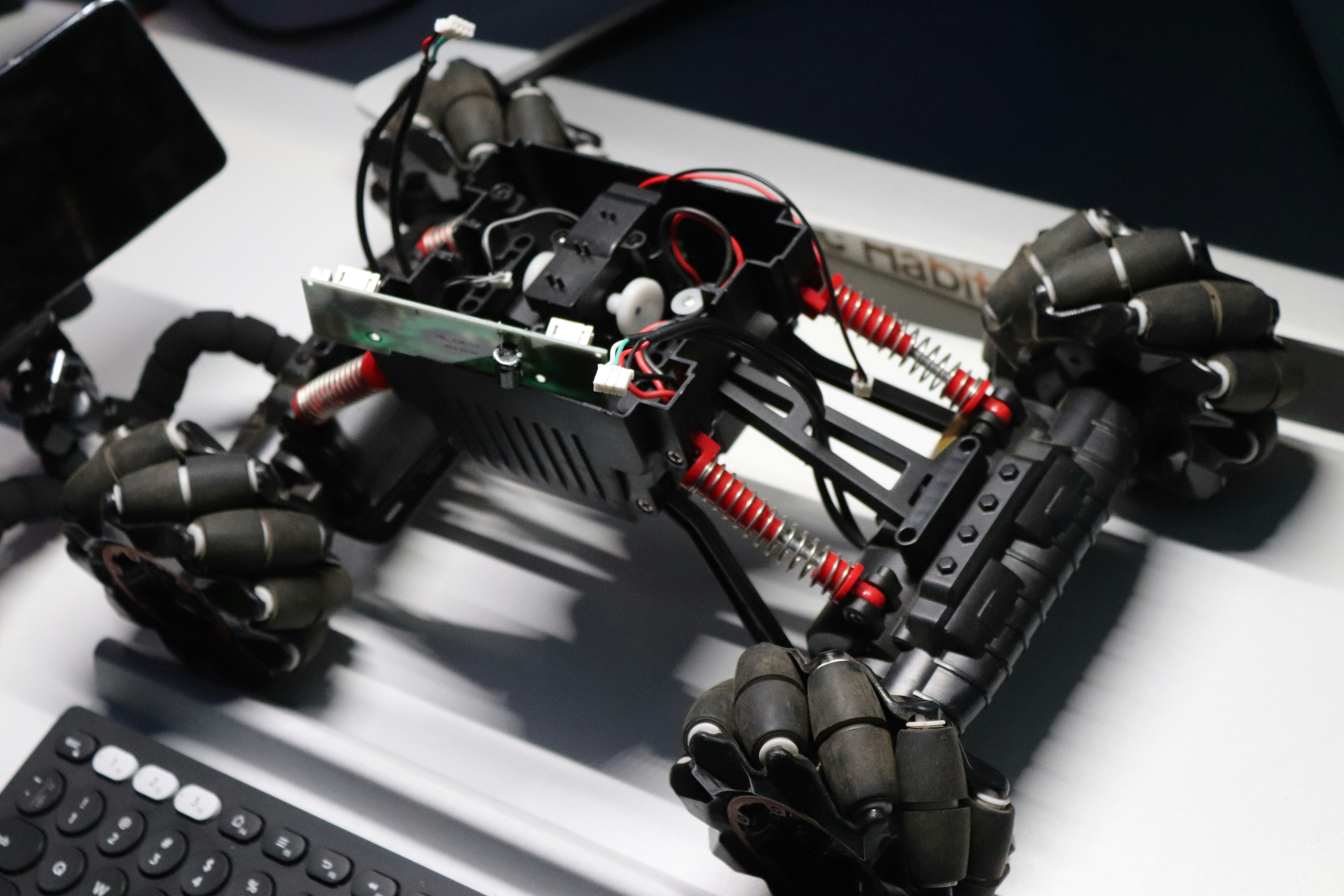 | 小売店向けの自動搬送ロボット、関連製品を全て設計。限られた出力、狭い使用環境の中で安全に最大限効率的に駆動できるよう軽量化・筐体保護を徹底。 |
| 自律走行 ロボット用 計測 ユニット |  | 厳しいコスト・納期制約下で、パイプフレームによる一体組立と高度な組込みソフトチューニングを融合。剛性を最適化することで、走行振動の減衰と計測精度の安定化、さらにセンサーの耐久性向上というトレードオフの課題を解決。原価目標を達成しつつ、現場で動く実用的なハードウェアを開発から量産まで担当 |
| リフター オプション |  | 積荷、荷卸で腰が痛くなる、フル自動だと費用的に厳しいとのことで足踏みリフターを開発。既製品の組み合わせにより開発費を抑制。 |
ソフトウェア開発実績は以下の通りとなっております。
| 実績 | イメージ | 詳細 |
|---|---|---|
| 牽引台車の走行軌跡 シミュレーション | 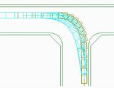 | 自律走行機体と台車を牽引したときの走行軌跡をシミュレート。Webブラウザ上で動作するHTML,CSS,JavaScriptにて開発。 |
| 光反射 シミュレーション | 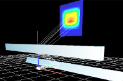 | 複合機等の縮小光学系スキャナモジュール内の光折り返しをリアルタイムで追跡し、ミラーを最適配置設計するための設計補助。言語は .NET Framework、c#、ライブラリはOpenGL |
| 画像解像度 判定検査 アプリケーション | 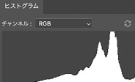 | スキャナで撮影した画像解像度を定量的に評価。画像をRGBに分解し、エッジ検出しヒストグラムを計算して判定。言語は .NET Framework、c#、ライブラリはOpenCV |
| 物体検知 アプリケーション |  | カメラで撮影した製品の検査画像から、特定の形状・大きさの物体を検知して、その位置と大きさを出力、判定。.NET Framework、c++、ライブラリはOpen CV |
| クラウド通信 システム | 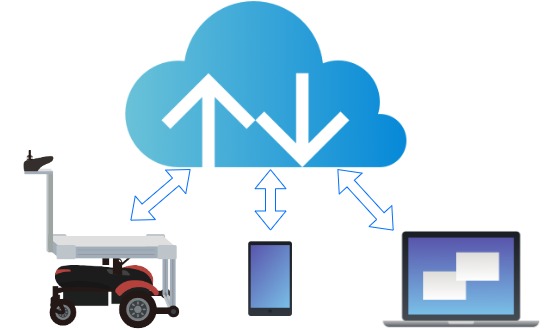 | ロボットをIOT化することでクラウド経由で状態把握、通知、遠隔操作、稼働データの見える化ができる通信システムを開発(詳細)。 |

初めて連絡頂いたときはどんなことができるのかなと思いましたが、実際にウワモノ製作の相談をしてみると想定しうるリスクと対策、費用を抑える方法も一緒に考えてくれました。また仕様についても実際につくらないと分からない点についても理解していただき、柔軟に対応頂けてます。また外国人のエンジニアとも英語でやりとりしてくれるのでコミュニケーションも早くてスムーズです。
元々搬送ロボットのシステムインテグレーターを探していました。知り合ってできることをきいたところハードウェアからソフトウェアまで組合せ含め提案の幅が広く、まさに求めていたシステムインテグレーター様だと思いました。ユーザー様企業への導入にあたり、どうしてもカスタマイズしないといけないことが多いためよくご相談させて頂いております。また、ユーザー様の予算を踏まえた提案をして頂けるため、導入にあたりカスタマイズ費用がネックになることが多かったのですがそのハードルを越えるよう前向きに考えて頂いてます。